

Franka Research 3

Franka Emika Franka Research 3 is the force sensitive robot system robot with AI and robotics research plaform. This has 7 DOF with torque sensors at each joint. It comes with fully integrated software for robot control which makes this system to utilize for pricise control line application in manufacting industires with great learning capabilities.
Specification
- Number of degrees of freedom: 7
- Payload: 3 kg
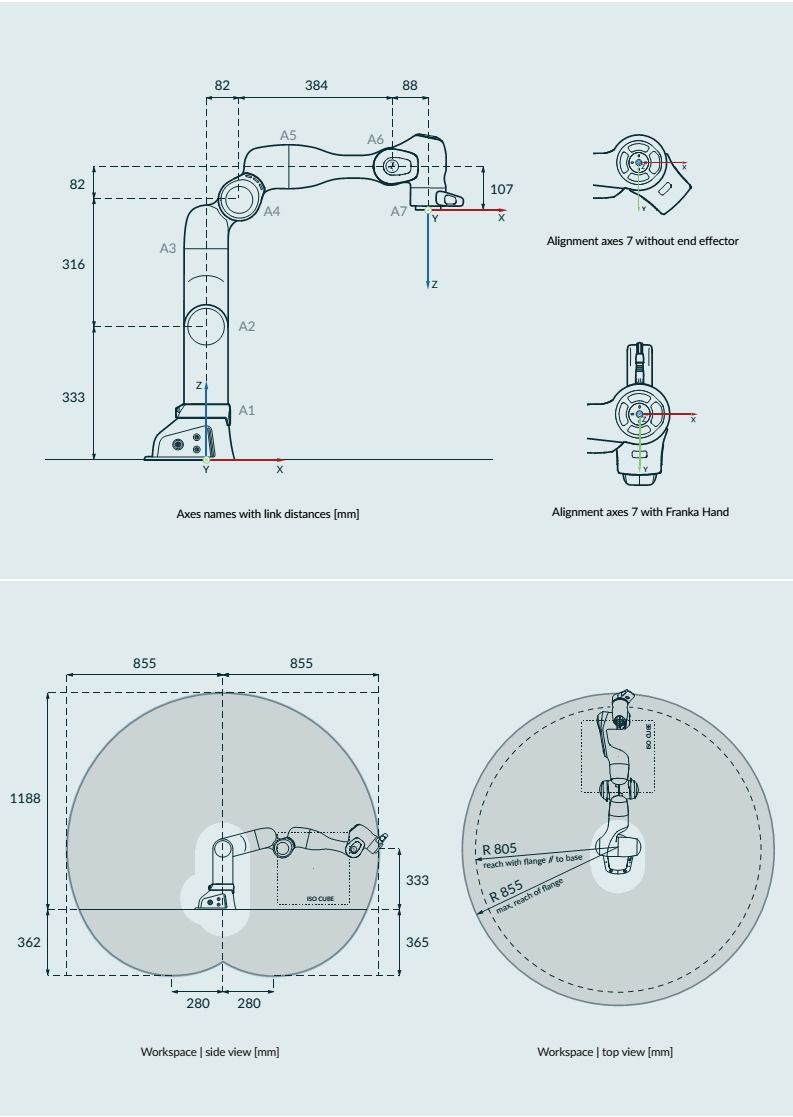
- Maximum reach: 855 mm
- industrial position repeatability of +/- 0.1 mm.
- Weight ~17,8 kg
- Ambieant temperature +5°C to +45°C
- Air humidity 20-80%, non-condensing
Features
- User-friendly robot functions
- 7 degrees of freedom
- Link-side torque sensor in all 7 axes
- Connector for end effector for replacing required end effector
- Emergency Stop Device
- Ethernet (TCP/IP) for visual intuitive programming with Desk
- libfranka C++ interface for interfacing with ROS, ROS2 and MATLAB & Simulink
Franka Control Interface (FCI):
The Franka Control Interface (FCI) allows a fast and direct low-level bidirectional connection to the Arm, Franka Hand and Cobot Pump. It provides the current status of the robot and enables its direct control with an externalworkstation PC connected via Ethernet.
libfranka C++ interface for interfacing with ROS, ROS2 and MATLAB & Simulink.
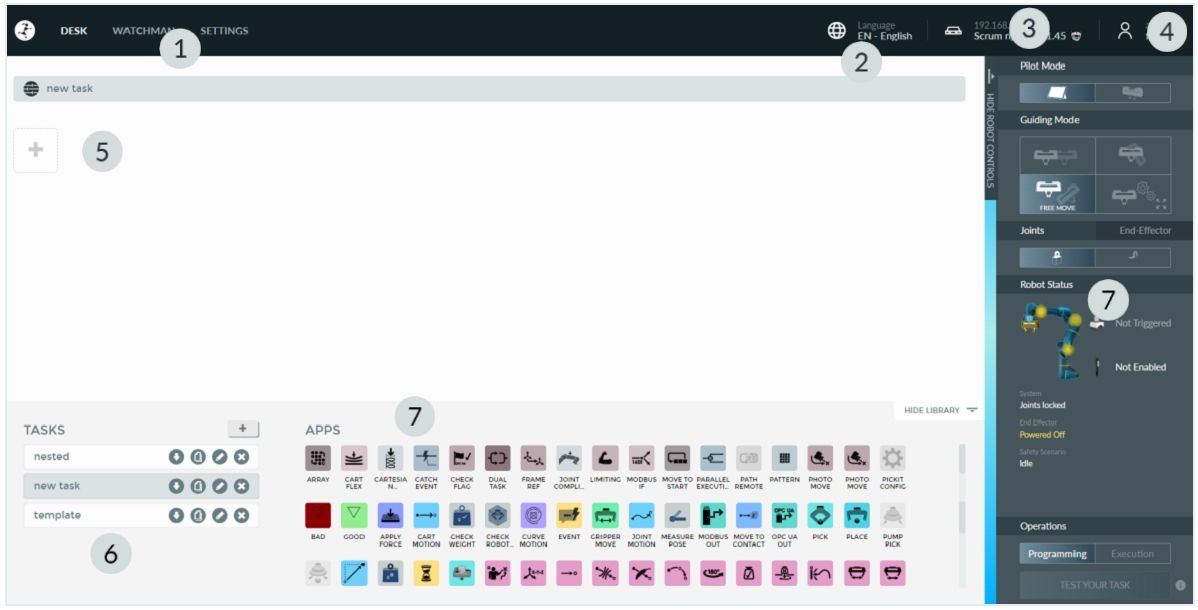
Franka UI
Franka UI is the user interface of the robots from Franka Robotics. It can be used to program and operate the robot in Desk.
Realtime Control and ROS Integration
The Franka Control Interface (FCI) allows a fast and direct low-level bidirectional connection to the Arm and Hand. It provides the current status of the robot and enables its direct control with an external workstation PC connected via Ethernet. By using libfranka, our open source C++ interface, you can send real-time control values at 1 kHz with 5 different interfaces:
- Joint level torque commands with gravity and friction compensation.
- Joint position or velocity commands.
- Cartesian pose or velocity commands.
Simultaneously, you gain access to 1 kHz measurements of:
- Joint data, e.g., the position, velocity and link side torque sensor signals.
- Estimation of externally applied torques and forces.
- Various collision and contact information.
The robot model library provides:
- Forward kinematics of all robot joints.
- Jacobian matrix of all robot joints.
- Dynamics, inertia matrix, Coriolis and gravity vector.
Additionally, franka_ros connects Franka robots with the entire ROS 2 ecosystem, integrating libfranka into ROS 2 Control. It includes URDF models and detailed 3D meshes of our robots and end effectors, which allows visualization (e.g., RViz) and and Gazebo simulation. And the MoveIt! integration simplifies motion planning and gripper control, with example implementations demonstrating how to operate the robot using ROS 2.
Diemnsion and Workspace
Package Contains
Franka Research 3 Robotic Arm